
A mobile robot that can change its wheels into legs to cover a range of terrains and urban military environments is being developed by a team at Texas A&M University.
The US Defence Advanced Research Projects Agency (DARPA) has partnered with the university to advance the adaptable wheel-and-leg transformable robot (a-WaLTR), which can determine, with or without human intervention, whether wheels or legs are more suitable.
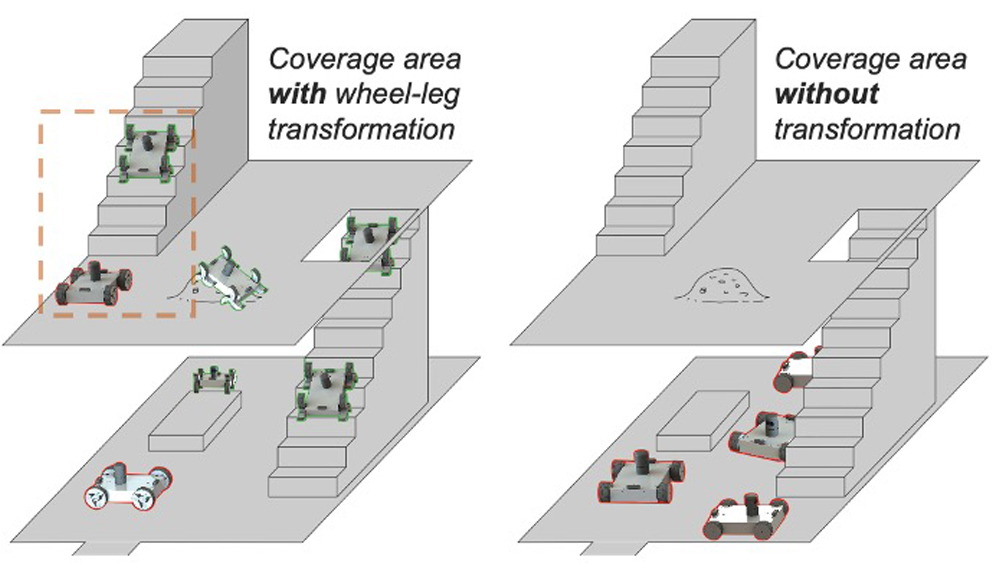
The a-WaLTR device is able to traverse varying surfaces, including climbing stairs. Though it has been developed for military use, the team said it aims for the technology to transcend this field into areas such as space, domestic services, surveillance and agriculture.
Dr Kiju Lee, associate professor at Texas A&M University’s Department of Engineering Technology and Industrial Distribution, said: “Legged locomotion is more versatile, but suffers from inherent structural, mechanical and control complexities.
“The proposed testbed will be equipped with novel wheel/leg transformable mechanisms, which can switch between the two locomotion modes actively adapting to its environment, but without needing any additional actuator.”
Lee was awarded the project after developing a mixed-reality swarm simulator with embedded consensus-based decision-making for adaptive human-swarm teaming as part of the Offset programme. The team will now develop prototypes to showcase at the Offset FX5 event scheduled for February 2021.





